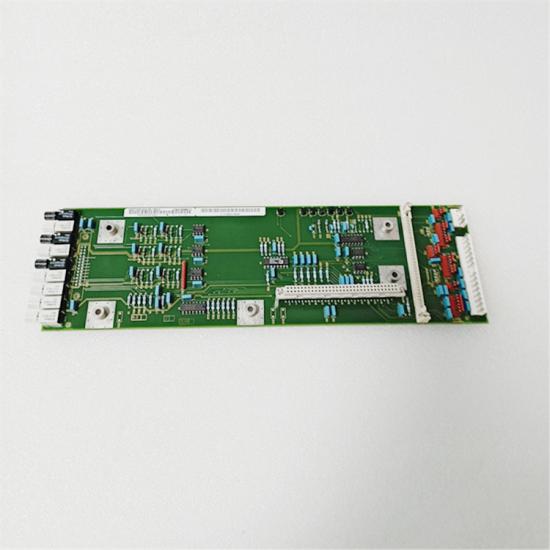
Terminal EtherCAT EL7342 memungkinkan pengoperasian dua motor DC secara langsung. Ini diisolasi secara galvanis dari E-bus. Kecepatan atau posisi ditentukan oleh perangkat otomasi melalui nilai 16 bit. Sambungan encoder inkremental memungkinkan sumbu servo sederhana direalisasikan.
 Indonesia
Indonesia English
English español
español العربية
العربية